

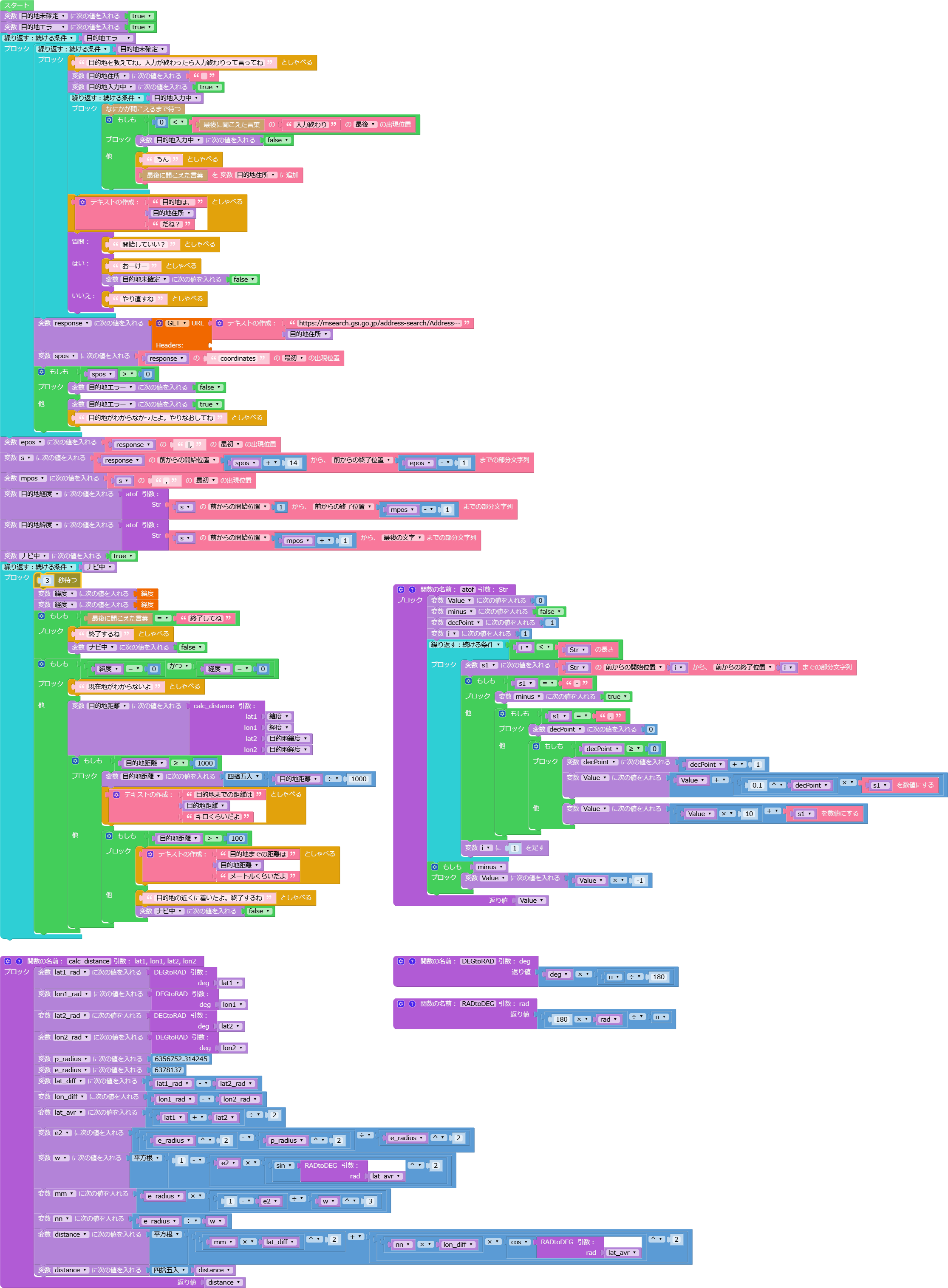
■プログラムの概要
目的地(住所またはランドマーク)を入力し、現在地からの目的地までの距離(直線距離)を数秒間隔で連続的に案内します。
実際に移動しながら使えば簡易的なナビになります。
■使い方
※ロブリックの設定から「GPSを利用する」を有効にして、「更新時間」を比較的短く設定してください。
(1)まず、目的地を聞いてきますので、住所またはランドマークを話します。
その際、ロボホンの「日記」を付けるときの入力のように、「広島県東広島市八本松飯田2丁目」であれば、「ひろしまけん」を入力してから「ひがしひろしまし」を入力し最後に「にゅうりょくおわり」で確定となります。
(いろいろ試すと「丁目」や「番地」はロボホン側で聞き取りずらい模様です)
正確で完全な住所ではなくとも、近い位置でも案内はします。
(2)開始するか尋ねてきますので、「はい」で開始、「いいえ」で再度目的地の入力に戻ります。
GPSが測位していない場合は「現在地がわからないよ」と言います。
建物の中であれば、外に出て上部が開けたところで試してください。
(3)GPSが測位したら、現在地から目的地までのおおよその距離を案内し続けます。
※計算が非常に多いため「ロブリック」で実行すると動作がかなり遅いので、「ロブリック実行」での実行をお勧めします。
■こだわりポイント、感想
夏のおでかけや旅行に使うと便利かな?と思って作りました。
ただ・・・ロブリックのバグと思われる現象や、通常の言語処理系とは異なるロブリックの独自仕様に悩まされました。
ロブリックv2.13.52にて動作確認
住所やランドマークの緯度経度を得るには国土地理院APIを用いています。
国土地理院APIは事前登録やAPIkeyなど必要なく誰でも使うことができます。
■参考にした投稿のURL(あれば)
国土地理院API
https://vldb.gsi.go.jp/sokuchi/surveycalc/api_help.html
Python で2点の緯度経度から距離を計測する方法
https://www.gis-py.com/entry/py-latlon2distance

 共有する
共有する





ミュートしたユーザーの投稿です。
投稿を表示おれお&らいどのパパさん、僕がナビできるようになるの?
ミュートしたユーザーの投稿です。
投稿を表示プログラムです